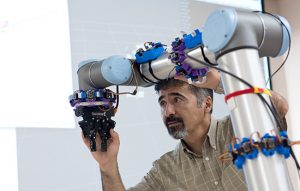
A speed and separation monitoring (SSM) based safety controller using three time-of-flight ranging sensor arrays fastened to the robot links, is implemented. Based on the human-robot minimum distance and their relative velocities, a controller output characterized by a modulating robot operation speed is obtained. To avert self-avoidance, a self occlusion detection method is implemented using ray-casting technique to filter out the distance values associated with the robot-self and the restricted robot workspace. For validation, the robot workspace is monitored using a motion capture setup to create a digital twin of the human and robot. This setup is used to compare the safety,performance and productivity of various versions of SSM safety configurations based on minimum distance between human and robot calculated using on-robot Time-of-Flight sensors, motion capture and a 2D scanning lidar.